GTBZ22S sirge käega õhuoperatsiooniplatvorm





I. Toote ülevaated ja omadused
GTBZ22S Sirge õlg ja iseliikuv õhusõidukiplatvorm tõstavad esile silmapaistva jõudluse, tõhususe, dünaamika ja hõlpsa kasutamise.See on tööstusharu juhtiv, mille maksimaalne kandevõime on 340 kg, kõrge töökõrgus ja amplituudiga, sobib suure koormuse ja laia tööpiirkonna ehitamiseks.
[Eelised ja funktsioonid]
● Kahekordne paralleelühendus ja teleskoopvars võimaldavad sõiduki raskuskeskme dünaamilist reguleerimist, muutes kogu sõiduki stabiilsemaks.
● 4WD, maastiku laiade rehvide ja telgede tasakaalusüsteemiga on masin suurepäraselt juhitav ja kohanemisvõimeline teega.
● Mitme koormaga ümbrikujuhtimistehnoloogiad suudavad koormust reaalajas jälgida, kasutades tõhusalt poomi ja muutes selle töö tulemuslikkuse esiservale.
●Auto tasakaalu pikendamise mehhanism parandab pikendamise mehhanismi ohutust ja pikendab terastrossi kasutusiga.
● Elektriline juhtimissüsteem võtab kasutusele PLC-l ja CAN-il põhinevad hajutatud juhtimistehnoloogiad, rakendades automaatset nivelleerimist, platvormi kasuliku koormuse kaalumist, dünaamilist jälgimist ja veahoiatust.
II.Põhiosade tutvustus
1. Šassii osa
Peamised konfiguratsioonid: 2WD, nelja ratta juhtimine, telgede tasakaal ja perfusioonvahtrehvid.
(1) Maksimaalne sõidukiirus 6 km/h.
(2) Maksimaalne tõstetavus 45%-Max.tasemel tööstuses
(3) Telgede tasakaalusüsteem – parandab oluliselt sõiduki võimet ületada ebatasast teed.
(4) Rakendatakse sisseehitatud sõidureduktorit, mis ühendab mootori ja reduktoriga, ning pakutakse kahte sõidukiirust (suur ja väike kiirus), et rahuldada masina sõiduvajadusi erinevates keskkondades.Sõidumehhanismil on kallakutel sõites isepidurdusfunktsioon ja see on varustatud siduriseadmega, mis hõlbustab rikke korral pukseerimist.
2. Poomi osa
(1) Ühest teleskoopsilindrist + trossist koosnev 3-sektsiooniline teleskooppoom.
(2) Poomi materjal – poom on keevitatud ülitugevast terasest, et saavutada kerge ja kõrge ohutus.
(3) Püsti + noole tõmbumine ja tõus üheaegselt, muutes selle produktiivsemaks.
(3) Tugevuse ja jäikuse sobitamine – see tagab poomi silmapaistva tugevuse ja jäikuse.
3. Pöördlaua osa
(1) Pöördlaud on võimeline pidevalt 360° pöörlema ja sellel on kaks auku transpordi lukustustihvtide paigaldamiseks.
(2) Toitesüsteem – Perkinsi/Deutzi mootorid on varustatud optimeeritud lööke summutava ja soojuse hajutamise süsteemiga.
(3) Väljapööratav mootorikinnitus on poltidega sõiduki raami külge kinnitatud ja seda saab välja keerata, et hõlbustada juurdepääsu mootorile ja selle kinnitustele hoolduse ja remondi jaoks.
4. Platvormi osa
(1) 2,4m × 0,9m suur tööplatvorm.
(2) 160° pööratav platvorm.
(3) Kandevõime kuni 340 kg.
(4) Elektrohüdrauliline proportsionaalne automaatne nivelleerimissüsteem võib reaalajas jälgida platvormi nurka, tasandades seda dünaamiliselt.
5. Hüdraulikasüsteem
(1) Suletud pump + muutuv pump: esimest kasutatakse töötava süsteemi juhtimiseks ja teist otse mootoriga käitatava täieliku hüdrosüsteemi juhtimiseks, välja arvatud töötav süsteem;
(2) Paigaldatud avariitoiteseade – see võib tagada, et mootori või õlipumba rikke korral saab poomi sõiduolekusse tagasi tõmmata.
(3) Pealisehituse hüdrosüsteem on muutuva pumba konstantse rõhuga süsteem: elektri-hüdraulilise proportsionaalse juhtimise tehnoloogiate alusel saab masin teostada pealisehitise pööramist, noole libistamist, noole sisse-/väljatõmbamist, töö pöördeid. platvorm;pealisehitise põhiventiil on pistikventiil;masin on paigaldatud hüdroõli radiaatoriga.
(4) Käigusüsteem on suletud muutuva süsteemiga - 4×4 ajamiga, mis on liigitatud kiir- ja väikekäigukastiks.Veermiku hüdrosüsteem võiks täita telgede tasakaalustamist ja juhtimisfunktsioone.
5. Elektrisüsteem
(1) PLC juhtimistehnoloogia – pöördlaua ja platvormi jaoks on ette nähtud üks kontroller.Šassii pöördaluse ja platvormi jaoks on vastavalt paigaldatud juhtkarbi šassii, pöördlaua, poomi ja platvormi juhtimiseks.
(2) Peamised juhtelemendid – mootori eelsoojendus, käivitamine, leegi kustutamine ja kiiruse reguleerimine;Mootori õlirõhu, jahutusvedeliku temperatuuri kontroll ja hoiatus;Šassii rooli- ja juhtimiskontroll;Pöördlaua pööramise ja poomi libisemise ja teleskoopjuhtimine;Platvormi pöörde juhtimine;Platvormi koormuse kontroll;Platvormi tasandamine.
(3) Mitmed ohutuskaitsemeetodid – mootori jälgimine ja kaitsme käivitamine;sõiduk – kaldehoiatus;ülekoormuse hoiatus;terastraadi lõtvuse jälgimine.
III.GTBZ22S põhiosade konfigureerimine
| S/N | Nimi | Kogus | Märge |
| Mootor | 1 | Perkins/Yuchai | |
| Reisimise reduktor | 4 | OMNI/RR | |
| Sõidumootor | 4 | DAFOSS/Shengbang | |
| Suletud pump | 1 | REXROTH/Liyuan | |
| Jõuseade | 1 | BUCHER | |
| Platvormi klapirühm | 1 | Sant/Shengbang | |
| Pöördlaua klapirühm | 1 | ||
| Liikuva juhtventiili rühm | 1 | ||
| Pöördsilinder | 1 | HELAC / Weihai Liansheng | |
| Vändahoova silinder | 1 | Chengdu Chenggang Hydraulic Equipment Co., Ltd./XCMG Hydraulic Parts Co., Ltd. | |
| Tasandussilinder | 1 | ||
| Pingutussilinder | 1 | ||
| Teleskoopsilinder | 1 | ||
| Roolisilinder | 2 | ||
| Tasakaalussilinder | 2 | ||
| Hüdraulikaõli radiaator | 1 | Yinlun | |
| Kontroller | 2 | XCMG | |
| Pöördlaua kaldeandur | 1 | Shanghai Parker Hannifin | |
| Platvormi kaldeandur | 1 | Xuzhou Youwell | |
| Kaaluandur | 1 | ||
| Juhtkang | 2 | DAFOSS | |
| Jalglüliti | 1 | PÄIKESED | |
| Pöörlev laager | 1 | Ma'anshan Fangyuan | |
| Pöörde reduktor | 1 | Xuzhou Keyuan | |
| Pöördmootor | 1 | Ningbo Zhongyi | |
| Rehv | 4 | Laizhou Yishimai |
IV.GTBZ22S peamine tehniline spetsifikatsioon
| Üksus | Üksus | Parameeter |
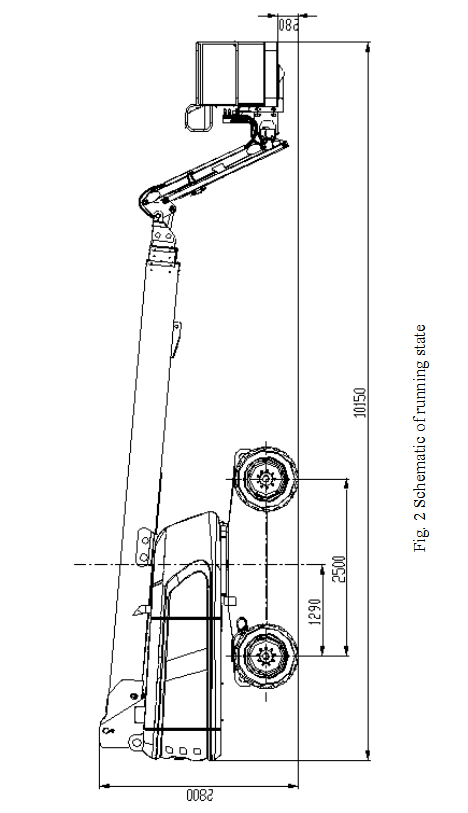
| a.Kogu masina pikkus | mm | 10150 |
| b.Kogu masina laius | mm | 2490 |
| c.Üldkõrgus | mm | 2800 |
| d.Teljevahe | mm | 2500 |
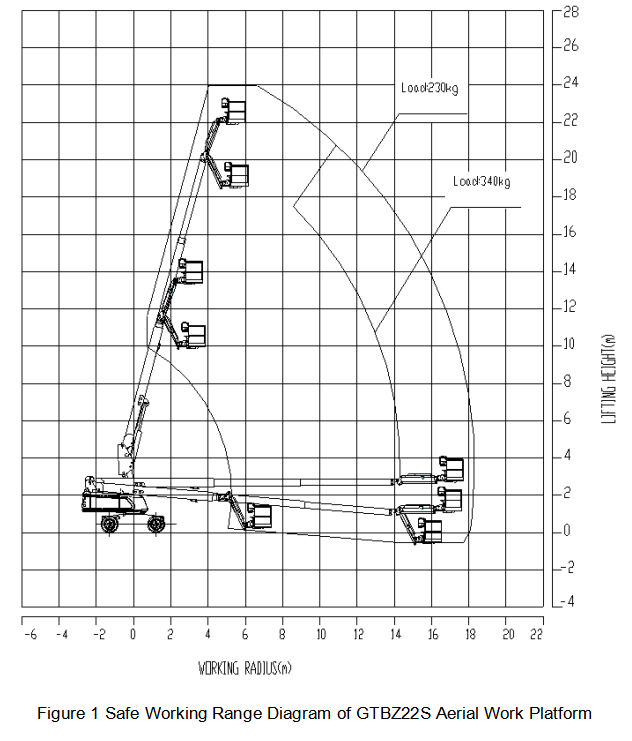
| Maksimaalne töökõrgus | m | 24 |
| Maksimaalne platvormi kõrgus | m | 22 |
| Maksimaalne tööulatus | m | 18.3 |
| Maksimaalne kandekaal | kg | 230 (piiranguta) / 340 (piiranguga) |
| Luffing valik poomi | ° | -5 ~ +75 |
| Pöördlaua pöördenurk | ° | 360 |
| Maksimaalne tahapööre | mm | 1550 |
| Platvormi mõõtmed | mm | 2400 × 900 |
| Platvormi pöördenurk | ° | 160 |
| Üldine kaal | kg | 12500 |
| Maksimaalne sõidukiirus | km/h | 6 |
| Minimaalne pöörderaadius | m | 6 |
| Minimaalne kliirens | mm | 230 |
| Maksimaalne astmelisus | % | 45 |
| Rehvi spetsifikatsioon | - | 355/55D625 |
| Mootori mudel | - | Perkins 404D-22TYuchai 4D24T00 |
| Mootori nimivõimsus | kW/(r/min) | 43/(2600)48/(2700) |
V. Masina ohutu tööpiirkonna diagramm
VI.Masina mõõtmete diagramm sõiduoleku all